
Во многих приложениях управления движением используются двигатели постоянного тока с постоянными магнитами, поскольку, по сравнению с двигателями переменного тока, их системы управления проще реализовать. По этой причине, Двигатели постоянного тока обычно выбираются, когда скорость, крутящий момент, или требуется контроль положения.
Обычно используются два основных типа двигателей постоянного тока.: коллекторные двигатели постоянного тока и бесщеточные двигатели постоянного тока, также известный как двигатели BLDC. Как следует из названия, Коллекторные двигатели постоянного тока используют щетки для переключения тока двигателя и поддержания вращения., тогда как бесщеточные двигатели заменяют механическую коммутацию электронным управлением..
Во многих приложениях можно использовать как коллекторные, так и бесщеточные двигатели постоянного тока.. Оба типа работают по одному и тому же принципу притяжения и отталкивания между намотанными катушками и постоянными магнитами., и у каждого есть свои преимущества и недостатки, возможность выбора на основе конкретных требований приложения.
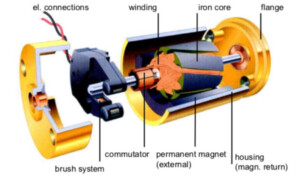
Двигатели постоянного тока используют намотанные катушки для генерации магнитных полей.. В коллекторных двигателях, катушки свободно вращаются, приводя в движение вал, и называются ротором.. Катушки обычно наматываются на железный сердечник., хотя существуют и бессердечниковые коллекторные двигатели, у которых обмотки самонесущие.
Неподвижная часть двигателя называется статором.. Постоянные магниты, создающие фиксированное магнитное поле, обычно устанавливаются на внутренней поверхности статора и вокруг внешней поверхности ротора..
Для создания крутящего момента, который вращает ротор, магнитное поле ротора должно вращаться непрерывно, чтобы притягивать и отталкивать неподвижное магнитное поле статора. Это вращающееся поле обычно достигается с помощью скользящего электрического переключателя, состоящего из коллектора и фиксированных щеток.. Коммутатор обычно представляет собой сегментированный контактный узел, установленный на роторе., при этом неподвижные щетки прикреплены к статору.
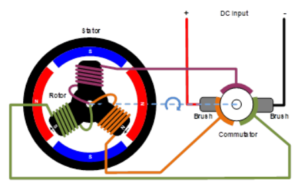
Когда ротор вращается, коммутатор неоднократно подключает и отключает разные обмотки ротора., заставляя катушки ротора постоянно притягиваться и отталкиваться фиксированными магнитами статора., тем самым поддерживая вращение.
В коллекторных двигателях между щетками и коллектором возникает механическое трение., и так как это электрические контакты, смазка вообще невозможна. Как результат, щетки и коллекторы подвергаются механическому износу в течение всего срока службы двигателя., что в конечном итоге может привести к провалу. Однако, много коллекторных двигателей, особенно большие, есть сменные щетки, обычно из углерода, которые поддерживают хороший контакт даже во время ношения. Эти двигатели требуют периодического обслуживания.. Даже со сменными щетками, коммутатор со временем изнашивается до такой степени, что двигатель необходимо заменить..
Для управления коллекторным двигателем необходимо подать на щетки постоянное напряжение., позволяя току течь через обмотки ротора и вызывать вращение.
Если коллекторному двигателю необходимо вращаться только в одном направлении без контроля скорости или крутящего момента, никакая приводная электроника вообще не требуется. В таких приложениях, двигатель можно просто запустить или остановить, включив или выключив напряжение постоянного тока., что часто встречается в недорогих приложениях, таких как электрические игрушки.. Реверсивное вращение может быть достигнуто с помощью биполярного переключателя..
Когда скорость, крутящий момент, и контроль направления необходим, H-мост, состоящий из электронных ключей — транзисторов, БТИЗ, или МОП-транзисторы — используются для управления двигателем в любом направлении.. На двигатель можно подать напряжение любой полярности., заставляя его вращаться в разные стороны. Затем скорость или крутящий момент двигателя можно контролировать путем модуляции ширины переключающих импульсов..

Бесщеточные двигатели постоянного тока
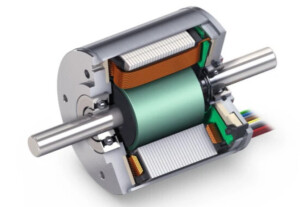
Бесщеточные двигатели постоянного тока работают по тем же принципам магнитного притяжения и отталкивания, что и коллекторные двигатели, но немного отличаются по конструкции.. Вместо механических коммутаторов и щеток, бесщеточные двигатели используют электронный коммутатор для вращения магнитного поля статора., для чего требуется активная управляющая электроника.
В бесщеточном двигателе, постоянные магниты прикреплены к ротору, при этом обмотки установлены на статоре. Ротор может располагаться внутри обмоток., как показано на схеме выше, или вне обмоток, иногда называемый двигателем с внешним ротором.
Количество обмоток, используемых в бесщеточном двигателе, называется числом фаз.. Хотя существуют разные фазовые конфигурации, Трехфазные бесщеточные двигатели являются наиболее распространенными.. В небольших приложениях, таких как охлаждающие вентиляторы, могут использоваться однофазные или двухфазные конструкции..
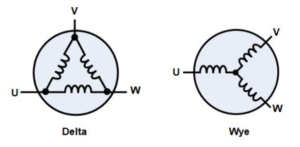
Три обмотки бесщеточного двигателя обычно соединены звездой. (Да) или дельта (Д) конфигурация. В обоих случаях, три провода подключаются к двигателю, а методы привода и формы сигналов остаются прежними.
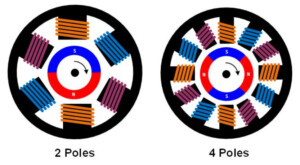
Трехфазные двигатели могут быть изготовлены с различными магнитными конфигурациями, известными как пары полюсов.. Самый простой трехфазный двигатель имеет два полюса., это означает, что ротор имеет одну пару магнитных полюсов: один север и один юг. Больше полюсов можно реализовать путем добавления дополнительных магнитных секций в ротор и дополнительных обмоток в статор.. Большее количество полюсов улучшает производительность, в то время как меньшее количество полюсов обеспечивает более высокие скорости вращения.
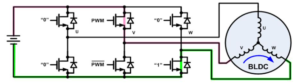
Для привода трехфазного бесщеточного двигателя, каждая из трех фазных обмоток должна быть последовательно переключена либо на высокий, либо на низкий потенциал в зависимости от положения ротора.. Обычно это достигается с помощью трех полумостовых схем управления., каждый состоит из двух переключателей. В зависимости от требуемого напряжения и тока, эти переключатели могут быть биполярными транзисторами, БТИЗ, или МОП-транзисторы.
Для трехфазных бесщеточных двигателей доступно несколько методов привода.. Самый простой известен как трапециевидный привод., прямоугольный привод, или 120-градусное управление коммутацией. Трапециевидная коммутация чем-то похожа на коммутацию в коллекторных двигателях постоянного тока.: в любой момент времени, одна фаза подключена к земле, одна фаза открыта, а третья фаза подключается к питающему напряжению. Управление скоростью или крутящим моментом достигается за счет широтно-импульсной модуляции фазы, подключенной к напряжению питания.. Потому что фазы переключаются резко в каждой точке коммутации, а ротор вращается непрерывно., крутящий момент меняется по мере вращения двигателя, явление, известное как пульсация крутящего момента.
Улучшения производительности можно добиться, используя альтернативные методы коммутации., например, синусоидальная или 180-градусная коммутация, в котором все три фазы двигателя приводятся в действие непрерывно. Контроллер регулирует привод для создания синусоидальных токов в каждой из трех фаз., со сдвигом фаз между ними на 120 градусов. Этот метод привода сводит к минимуму пульсации крутящего момента., шум, и вибрация, что делает его пригодным для высокопроизводительных или высокоэффективных приводов..
Чтобы правильно вращать магнитное поле, управляющая электроника требует знания физического положения магнитов ротора относительно статора.. Эта информация о положении обычно получается с помощью датчиков Холла, установленных на статоре.. Когда магнитный ротор вращается, датчики Холла обнаруживают его магнитное поле. Электроника привода использует эту информацию для управления током через обмотки статора и поддержания вращения ротора..
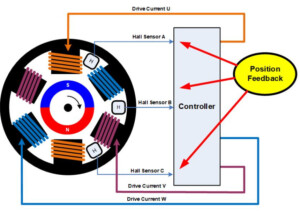
Использование трех датчиков Холла, трапециевидную коммутацию можно реализовать с помощью простой комбинационной логики., устраняя необходимость в сложной управляющей электронике. Другие методы коммутации, например, синусоидальная коммутация, требуется более сложная электроника и обычно микроконтроллер..
Помимо использования датчиков Холла для обратной связи по положению, несколько методов позволяют определить положение ротора без датчиков. Самый простой подход включает в себя мониторинг обратной ЭДС на неведомой фазе для определения магнитного поля относительно статора.. Более продвинутый алгоритм управления, известный как полеориентированное управление (ФОК), вычисляет положение на основе тока ротора и других параметров. FOC обычно требует мощного процессора для быстрого выполнения многочисленных вычислений., что делает его значительно дороже, чем простое трапециевидное управление..
Срок службы
Как отмечалось ранее, существенным недостатком коллекторных двигателей является механический износ между щетками и коллектором.. Угольные щетки, в частности, являются расходными материалами и требуют периодической замены во многих графиках технического обслуживания двигателя.. Мягкая медь коллектора также постепенно изнашивается из-за контакта со щеткой., в конечном итоге приводит к отказу двигателя. Бесщеточные двигатели не имеют подвижных контактов и поэтому не подвергаются такому износу..
Скорость и ускорение
Скорость коллекторных двигателей ограничивается щетками., коммутатор, и масса ротора. На очень высоких скоростях, контакт между щетками и коллектором становится неустойчивым, и дуга по щеткам увеличивается. В большинстве коллекторных двигателей в роторе также используются ламинированные железные сердечники., что приводит к относительно высокому моменту инерции, который ограничивает скорость ускорения и замедления. Использование высокопроизводительных редкоземельных магнитов в роторе может минимизировать момент инерции., хотя и по повышенной цене.
Электрический шум
Щетки и коммутатор действуют как электрические переключатели.. Поскольку двигатель вращается, эти переключатели открываются и закрываются, вызывая протекание больших токов через индуктивные обмотки ротора и образование дуги на контактах.. Эта дуга генерирует значительный электрический шум, который может попасть в чувствительные цепи.. Добавление конденсаторов или RC-демпферов к щеткам может в некоторой степени уменьшить искрение., но мгновенное переключение коммутатора все равно создает некоторый электрический шум..
Акустический шум
Коллекторные двигатели используют «жесткое переключение».,» означает, что ток резко переносится с одной обмотки на другую.. При включении и выключении обмоток, крутящий момент меняется во время вращения ротора, создание пульсаций крутящего момента. Бесщеточные двигатели могут контролировать ток обмотки для постепенного перехода между фазами., уменьшение пульсаций крутящего момента. Пульсации крутящего момента представляют собой механическую пульсацию энергии на роторе., вызывая вибрацию и акустический шум, особенно на низких скоростях ротора.
Расходы
Технология коллекторных двигателей хорошо зарекомендовала себя и недорога в производстве.. Бесщеточные двигатели требуют более сложной электроники., что приводит к увеличению общей стоимости системы, но механически проще производить без щеток и коллекторов.. Бесщеточные двигатели получают все большее распространение., особенно в крупносерийных приложениях, таких как автомобильные двигатели. Более того, Падение стоимости электронных компонентов, таких как микроконтроллеры, сделало бесщеточные двигатели более экономически привлекательными..
Заключение
Бесщеточные двигатели становятся все более популярными из-за снижения затрат и превосходной производительности.. Однако, Коллекторные двигатели остаются лучшим выбором для определенных применений..
Как видно из автомобильных приложений, к 2020 наиболее непрерывно работающие двигатели в транспортных средствах, такие как насосы и вентиляторы, перешли от щеточных к бесщеточным конструкциям для повышения надежности.. Снижение частоты отказов возбуждения и меньшие требования к техническому обслуживанию полностью компенсируют более высокую стоимость бесщеточных двигателей и их приводной электроники..
С другой стороны, двигатели, используемые для нечастой эксплуатации, например, для сидений с электроприводом и электрических стеклоподъемников, по-прежнему преимущественно используют матовый дизайн. Общее время эксплуатации за весь срок службы автомобиля относительно невелико., сделать неудачу маловероятной.
Поскольку стоимость бесщеточных двигателей и связанной с ними электроники продолжает снижаться, бесщеточные конструкции постепенно проникают в приложения, в которых традиционно доминируют коллекторные двигатели.. Еще одним примером автомобилестроения является использование бесщеточных двигателей в системах регулировки сидений в автомобилях высокого класса., в первую очередь из-за более низкого акустического шума.